近日,我院鄢晓晖副教授团队在微纳机器人辅助膀胱癌精准治疗领域取得重要进展,相关研究成果以题为“Machine-intelligent multimodal algebot for intracavitary chemotherapy”的论文在线发表于国际期刊《自然·纳米技术》(Nature Nanotechnology)。研究团队开发了一种具有智能导航和主动递送能力的微藻机器人(algebot),可在人工智能影像反馈和磁场调控下实现自主导航,并通过运动诱导的非接触式对流输运增强药物释放和组织渗透,为膀胱癌腔内化疗提供了一种精准、高效、非侵入性的治疗新策略。
膀胱癌是泌尿系统常见恶性肿瘤之一,具有较高复发率。临床上常采用膀胱腔内灌注化疗降低术后复发风险。然而,传统灌注治疗主要依赖药物被动扩散,受到肿瘤靶向不足、黏液及组织屏障阻碍、药物滞留时间有限等因素影响,难以实现药物在病灶区域的充分富集和深层渗透。因此,如何实现腔内药物的精准定位、有效释放和高效穿透,是提升膀胱癌治疗效果的重要挑战。
针对上述难题,鄢晓晖副教授团队联合哈尔滨工业大学(深圳)马星教授、香港大学唐晋尧教授及爱丁堡大学周琦研究员,利用具有天然层级多孔结构的海洋硅藻(Coscinodiscus granii)作为生物模板,构建了磁性载药微藻机器人(DMCG)。该微机器人结合硅藻天然纳米多孔结构的药物负载优势与磁性功能化带来的主动运动能力,实现了从药物装载到主动递送的功能集成。在此基础上,研究团队建立了基于深度学习影像反馈的智能导航系统,使微机器人能够在复杂膀胱环境中实现实时感知、路径规划和自主运动控制。同时,通过磁场调控微机器人群体运动状态,实现了运动过程中的动态流体调节。该策略利用微机器人运动诱导的局部对流增强传质效应,突破传统化疗依赖被动扩散的限制,实现药物释放与组织渗透的时空调控。
微藻机器人膀胱治疗策略的工作流程
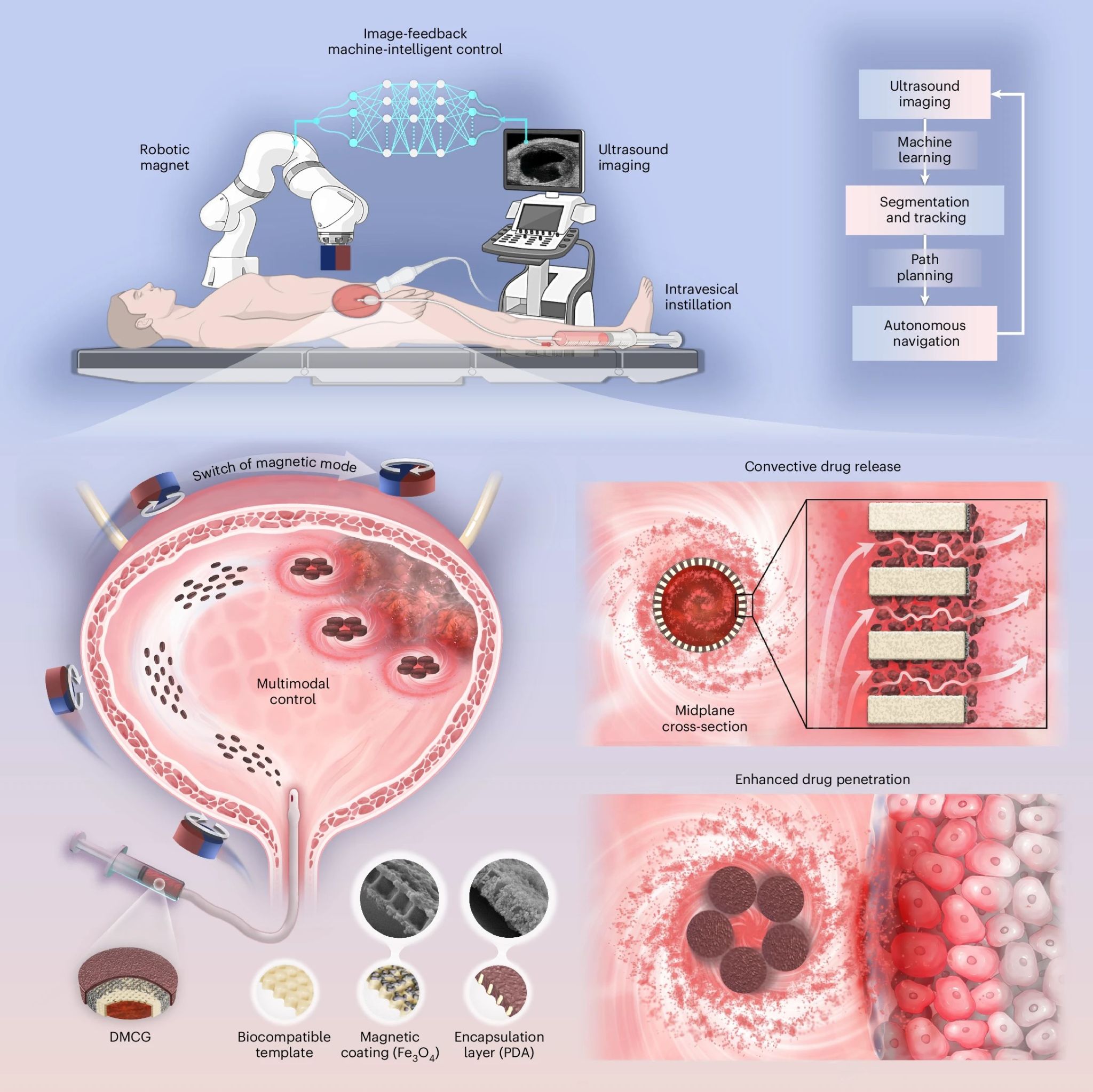
微藻机器人用于膀胱癌腔内化疗的工作原理示意图
在原位膀胱癌小鼠模型中,该微机器人递送系统显著提升了药物在肿瘤区域的渗透效率,相比传统膀胱灌注方式实现超过10倍的药物渗透增强,并在一周治疗周期内显著降低肿瘤负荷,肿瘤信号降低至传统灌注治疗组的3%以下。同时,该治疗策略未引起明显系统性毒性,展现出良好的安全性。该研究提出了一种融合智能导航、磁控群体调节和动态传质增强的新型腔内治疗体系,为突破复杂生物屏障、提升局部药物治疗效率提供了新的技术路径。未来,研究团队将进一步优化智能控制策略,拓展该微机器人平台在其他腔道疾病精准治疗中的应用,并开展更深入的安全性和转化研究。
我院博士生林麟、硕士生李浩辉及爱丁堡大学周琦研究员为该论文共同第一作者;我院鄢晓晖副教授、哈尔滨工业大学(深圳)马星教授、香港大学唐晋尧教授、爱丁堡大学周琦研究员为共同通讯作者。该研究得到了国家重点研发计划、国家自然科学基金、厦门大学校长基金和翔安创新实验室/传染病疫苗研发全国重点实验室科技项目等项目的资助。
论文链接:https://www.nature.com/articles/s41565-026-02195-0
(公共卫生学院)

